







The inception of ‘WOT - A -BOT’ started with a brief to construct an amphibious robot employing clever yet innately simple paper folding techniques. It took cues from various Bio-inspirations throughout design development with the motion of a Manta-ray as the most prominent influence. The project revolved around developing a single paper fold hinge mechanism contributing to both a crawling motion as well as a swimming motion. The primary goal was to keep the geometry of the mechanical hinge as humble as possible yet at the same time extracting a sophisticated fluid output motion.
in collaboration with : Niccolò Dambrosio, Sahej Bhatia
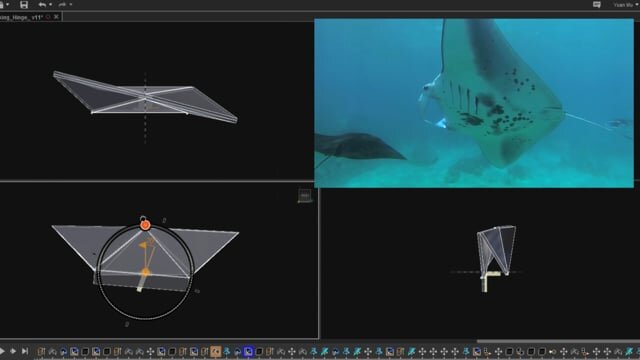
Contribution: fusion360 linkage simulation, arduino programming
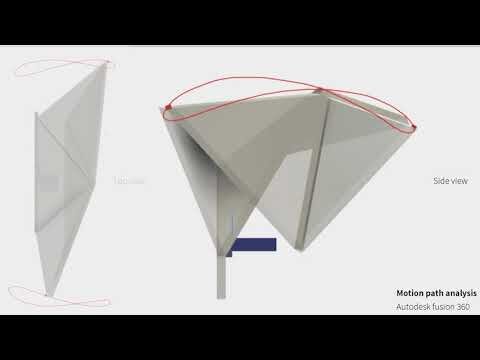
The making of wot-a-bot involved both design dexterity as well as technological skillsets and CAD modeling to map out the mechanical motions of the 6 Bar, Single degree of freedom hinge design.
* Pair up
* More surface area gives better output motion
To synchronize the motors for better control, we used processing over Bluetooth pairing whereby we achieved individual motor control using the laptop keyboard. We set up keyboard aliases to increase/decrease or change the direction of the rotation..
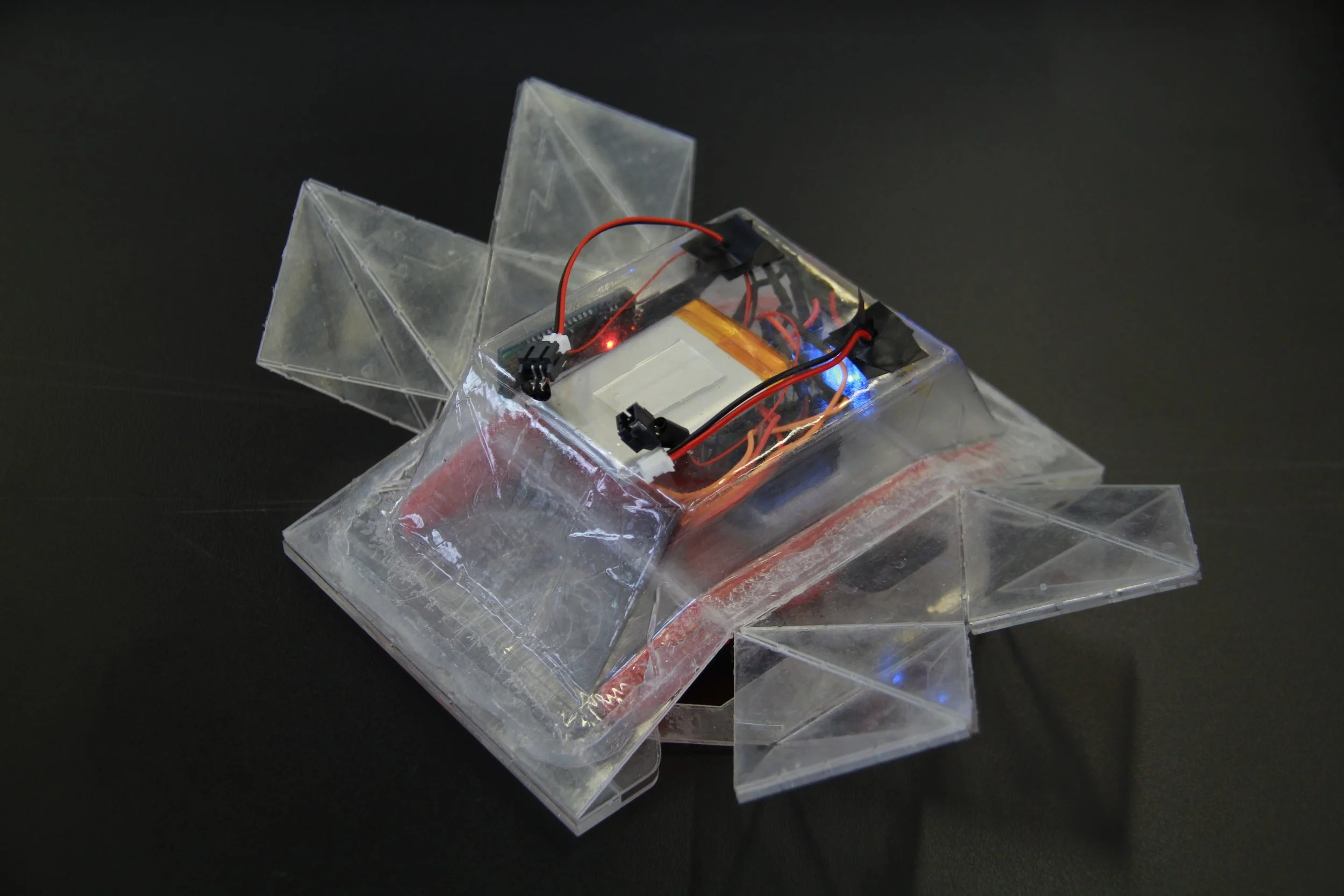
The electronics where then packed into the vacuum-formed plastic case and sealed with silicone consistently. This step gave us some more motor control however the Bluetooth pairing was not as accurate. Nonetheless alas we had our Wot-a-bot.