






"Our perception of architecture depends on the activities that take place inside. The space is transformed by events.”
--- Bernard Tschumi
This project formally illustrates perceptual experience, developing new notions of image and representation. The human visual experience is layered with a set of cognitive focuses. Unlike a machine human site is always changing; mixed into a soup of various focal ranges. Sometimes we see far, sometimes close; sometimes we blink and missed visual information, sometimes we are seeing with peripheral vision and sometimes we are fixated on studying details. Unlike photographs or film, human perception is extremely variable. Through the premise that sight is an interpretive tool, this project uses it to describe a relationship between the visual transformation that a human creates through the lens of his or her experience in space, into the formal transformation of the site itself. Rethinking the representation of a viewer’s experience moving through space, the given visual language of movement through space imitates the panoramic scene in a film. Where the experiences of space are created through a sequence of consistently captured still images of the uniform resolution, delivered at a fixed framerate.
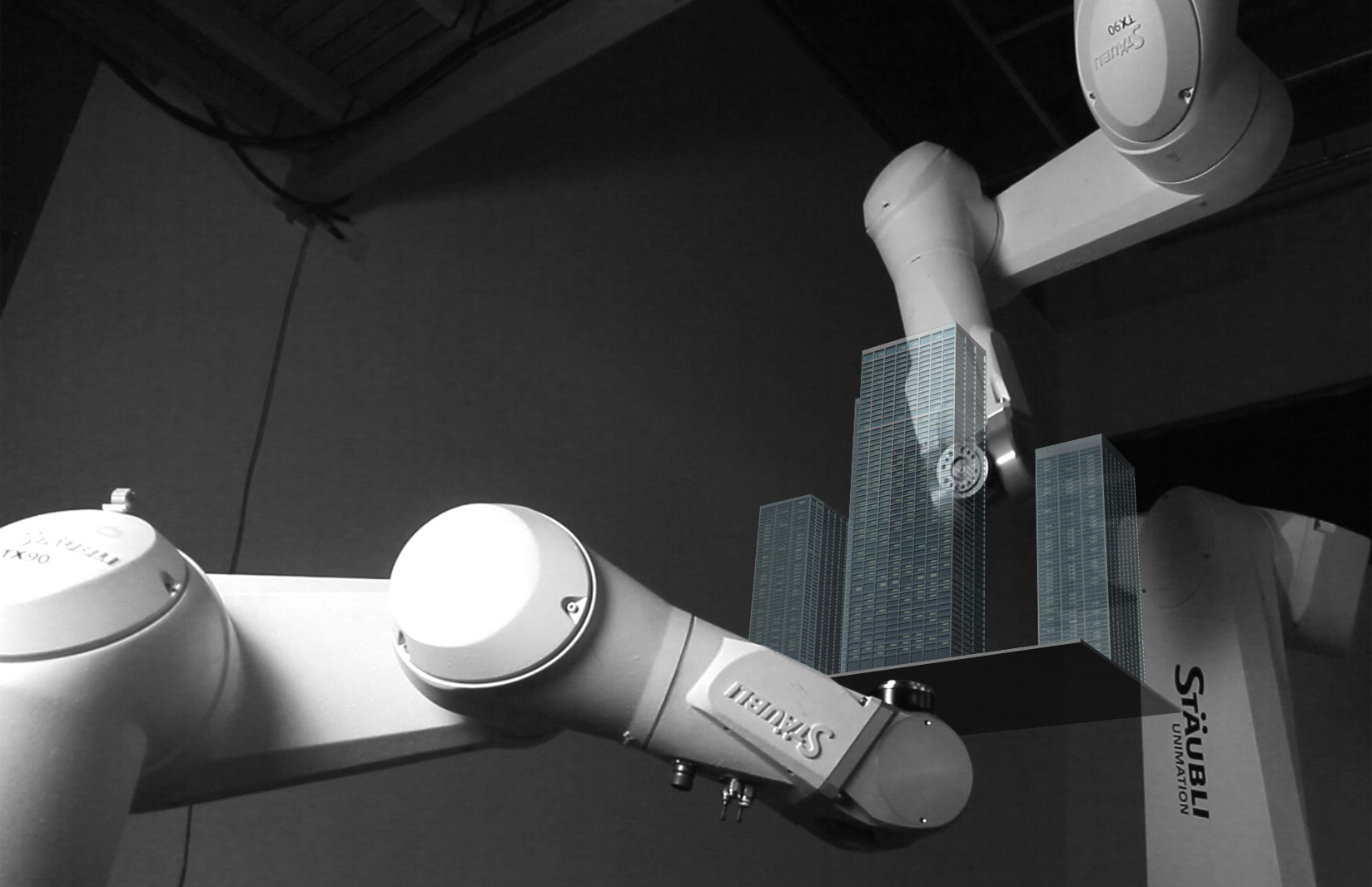
In this process, we translated the site, the Toronto Dominion, to the Robot House. This gave a platform to conduct exact experiments like the moving image. The Camera attached to the Robots is treated as a model of a person/viewer, that can move through a model site, (also re-created in the Robot house). Camera paths parallel the digital simulations, providing two platforms of representation of a person moving through the Toronto Dominion. We used the footage that we took in the lab to examine the gap between digital and physical, between human and camera. Creating parallel versions of discontinuity using both virtual and physical camera images.
Contribution: robot setup in Maya, drawing and diagram, animation
in collaboration with: Mary Franck, Sierra Havey, Nina Soltani
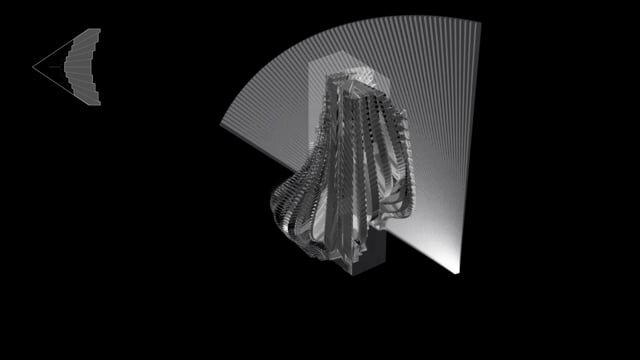
A photograph or a film has a fixed sample size and the pixel resolution of the camera. Whereas, human attention is not fixed but can be narrowly focused or very broad. If one takes normal film and samples from it at different sizes over time a discontinuous slit-scan image is produced. As this project samples in 3D, the field of view is the sampler and must have dimension. Thus, the sample size is the width of our sampler and can be varied over time. An aspect of perception is duration. Humans see faster than film, but also miss information, such as when they blink. This can be thought of as Sample Rate. In film, the sample rate is usually fixed at 24 frames per second. In this project, the sample rate is how frequently the site is sampled as the viewer moves through it. Low resolution in this case is infrequent sampling, which produces aliasing. High resolution is frequent sampling, producing continuity. Variable resolution is when the frequency changes over time.
This geometrical and formal approach to perception results in a deformation of the site, reflecting the discontinuous and variable nature of perception. It is a project not dependent on contexts but rather uses the nature of experience, to reform place. The human field of view is not uniform. In addition to focal distortion the periphery of vision captures less information. For the sampler to reflect the difference between the central and peripheral vision, we added another dimension of resolution by creating a variable sampler with finer detail towards its center. To represent focal distortion, a displacement gradient is applied across the sampler.